While environmental considerations have been a focus area for the scientific community for some time now, its formal acknowledgement as a topic of interest was a declaration on 22nd April 1970. Resulting in a date we still celebrate as World Earth Day. In its early years, environmental concerns centered around pressing topics of the time – primarily clean air and water. As the world has evolved, the topic of conservation against the backdrop of technology has gradually moved more towards sustainability.
Robots play an important part in the sustainability conversation. This has, however, rapidly moved away from the concept of building energy-efficient machines, in the recent past. Today, the emphasis on sustainability in robotics is about how information systems manage these machines—whether they do it continuously, intelligently, and at scale.
Efforts to make robots more efficient have been ongoing for years. But the breakthrough that we’re probably waiting for is based on when they are made smart enough to know when not to work. In short, it’s all about the ability of robots to make decisions, rather than the actual hardware of the machine itself. A robot is only as smart as its motor and materials and only as sustainable as its power consumption. Limitations inherent in robotic hardware imply that true sustainability will need to go two steps beyond this – into decision-making that determines when and how often a robot runs, and when it can limit itself. This is the true shift that now needs to be made – from engineering to orchestration.
Information systems need to move the focus more into how robots modify the way they function during low demand windows. Optimizing their energy usage would also mean powering down robots that are idle. Redistribution of workloads based on the output isn’t really something that engineering design can address, but a smart information system definitely can. However, this cannot happen in isolation – and this is where orchestration matters.
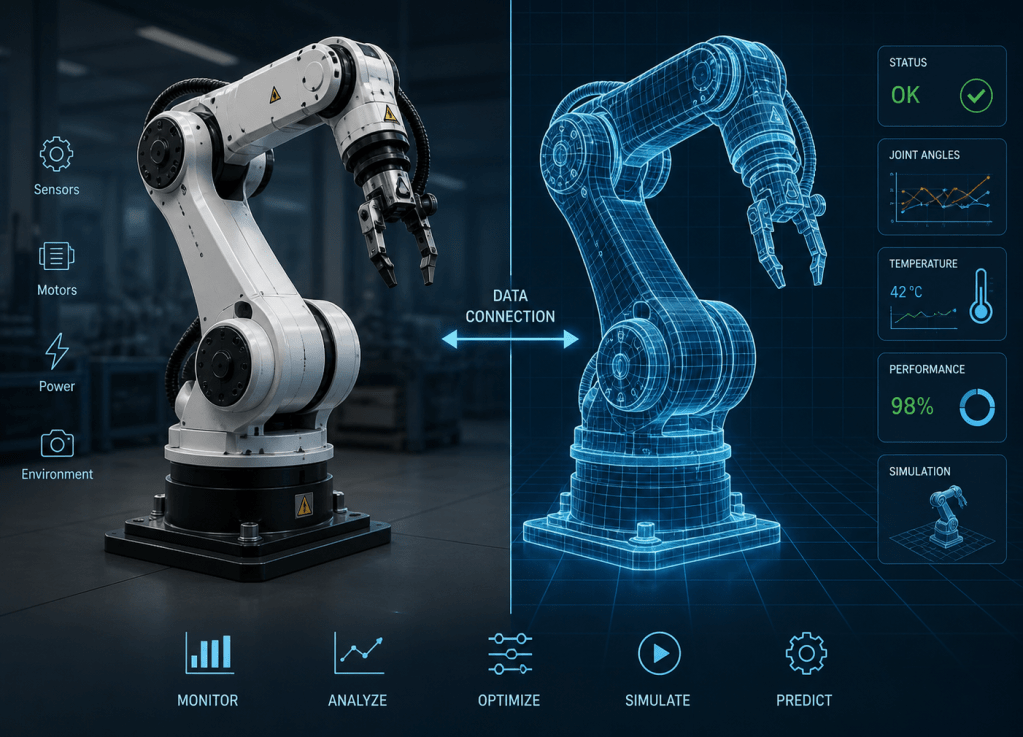
One of the easiest ways to make orchestration intelligent is to introduce digital twins. It is one of the more obvious methods to shift sustainability from reactive intent to preemptive design – where systems are optimized before resources are consumed. To explain it simply, it’s about creating a living, virtual model of the robot, its environment and the workflow, so that the system can simulate, predict and optimize operations before anything happens in the “real” world.
I was inspired, in this regard, by the concept of Virtual Singapore, a highly detailed 3D digital twin of Singapore in its entirety. This twin integrates data from buildings, transport systems, population and weather, Enabling the administration to manage heat during sharp weather conditions, and set rules for building design to make spaces cooler. It also tests energy efficiency during construction and allows a trial for the use of sustainable alternatives. Disaster management helps plan for emergencies, much before the city becomes vulnerable. This is a perfect example of how environmental impact is reduced on a large scale.
Hardware enables motion, orchestration governs behavior, and digital twins provide the intelligence layer that makes that governance sustainable. They help reduce idle time, cut unnecessary energy use, improve maintenance timing, and avoid waste from trial-and-error operations. That makes robotics less about building the “greenest machine” and more about running the whole robot ecosystem in the smartest possible way.
In sustainable robotics, the real leap does not lie in better machines, but in better coordination. It is all about the intelligence that decides how a hardware is used. Digital twins sit at the center of this shift. They connect the physical robot to a virtual system that manages energy, optimizes maintenance and continuously refines operations. In short, they turn a hardware problem into an orchestration problem, and orchestration into a sustainable strategy.
